Зловещая долина: от естественного человеческого – к сверхестевенному робота
К истокам оригинального эссе Масахиро Мори
«The Uncanny Valley» Масахиро Мори – влиятельное эссе в области робототехники. Впервые приводится русский перевод.
Более 40 лет назад Масахиро Мори, в то время профессор робототехники Токийского технологического института, написал эссе о том, как он представляет себе реакцию людей на роботов, которые выглядят и ведут себя почти как люди. В частности, он предположил, что реакция человека на человекоподобного робота будет меняться от сочувствия к отвращению по мере того, как роботы будут стремиться к реалистичному внешнему виду, но не смогут его достичь. Это психологическое падение реакции от симпатии, минуя равно души, вплоть до тревоги, ужаса и страха, испытываемых перед анропоморфными роботами, известно как «Uncanny valley» – или эффект зловещей долины.
Эссе впервые было опубликовано в малоизвестном японском журнале под названием Energy в 1970 году, и в последующие годы оно почти не привлекало внимания. Однако в последнее время концепция зловещей долины быстро привлекла интерес в робототехнике и других научных кругах, а также в популярной культуре. Некоторые исследователи изучали ее последствия с точки зрения взаимодействия человека и робота и компьютерно-графической анимации, другие занимались изучением ее биологических и социальных корней. Сейчас интерес к «долине зловещего» только усиливается, поскольку технологии развиваются, и ученые создают роботов, которые выглядят все более человекоподобными. Хотя копии эссе Мори распространялись среди исследователей, полная версия не была широко доступна. Это первая публикация русского технического перевода, представленного с целью ознакомления с идеями, наблюдениями и выводами профессора Масахиро Мори.
Долина в смысле принадлежности или родства
Математический термин «монотонно возрастающая функция» описывает связь, в которой функция y = ƒ(x) непрерывно возрастает с переменной x. Например, с ростом усилий x увеличивается доход y, или при нажатии на педаль газа автомобиль движется быстрее. Такая зависимость встречается повсеместно и её очень легко понять. На самом деле, поскольку такие монотонно возрастающие функции охватывают большинство явлений повседневной жизни, люди иногда поддаются иллюзии, что именно эти функции и описывают все отношения. В пользу ложности данной иллюзии свидетельствует и тот факт, что многие люди борются с жизнью, упорно пытаясь что-то оттолкнуть от себя прочь, не понимая эффективности обратного хода (притягивания). Вот почему люди обычно недоумевают, столкнувшись с каким-либо явлением, которому функция не может дать адекватного объяснения.
Примером функции, которая не возрастает непрерывно, является подъем в гору – соотношение между расстоянием (x), пройденным пешеходом до вершины, и высотой подъема (y) – с учетом промежуточных холмов и долин. Я заметил, что, стремясь к цели сделать роботов похожими на людей, наша симпатия к ним возрастает, до тех пор пока мы не оказываемся в долине (рис. 1), которую я называю долиной жути (зловещей долиной).
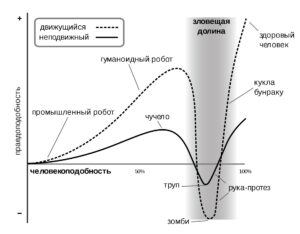
Рисунок 1. На графике изображена так называемая «зловещая долина» – отображающая предполагаемая связь между человеческим сходством с объектом и симпатией человека по отношению к нему. [Примечание переводчика: Бунраку – это традиционная японская форма музыкального кукольного театра, возникшая в 17 веке. Размер марионеток варьируется, но обычно их высота составляет около метра, они одеты в сложные костюмы и управляются тремя кукловодами, которых скрывают только их черные одеяния].
В наши дни промышленные роботы все чаще рассматриваются как движущая сила процесса сокращения численности персонала на предприятиях. Однако, как хорошо известно, эти роботы просто разводят руками, сгибают их или вращают; без лица и ног роботы не очень похожи на людей. Конструкторская политика явно основана на функциональности. С этой точки зрения, роботы должны выполнять функции, аналогичные тем, которые выполняют люди – работники завода, но выглядят ли они похоже, не имеет значения. Таким образом, учитывая отсутствие сходства робота с человеком, в целом люди почти не испытывают к ним симпатии.Если построить график зависимости симпатии от человекоподобия промышленного робота, то на рисунке 1 он лежит около начала координат.
В отличие от промышленных конструкторов, дизайнер игрушечного робота может уделять больше внимания внешнему виду робота, нежели его функциям. В результате, несмотря на то, что робот представляет собой прочную механическую фигуру, его внешняя форма будет напоминать человеческую: лицо, две руки, две ноги и туловище. Дети, похоже, испытывают сильную привязанность к этим игрушечным роботам. Поэтому на рисунке 1 игрушечный робот изображен на полпути вверх по первому подъему («холму» функции).
Поскольку создание искусственного человека является одной из задач робототехники, предпринимаются различные усилия по созданию человекоподобных роботов. Например, рука робота может состоять из металлического цилиндра с множеством болтов, но, покрыв ее «кожей» и добавив немного «мясистой пухлости», мы можем добиться более человекоподобного вида. В результате мы естественным образом реагируем на него усиленным чувством близости или симпатии.
Наверняка многие из наших читателей имеют опыт общения с людьми с ограниченными физическими возможностями, и все они сочувствовали тем, у кого нет руки или ноги и кто носит протез. В последнее время, благодаря колоссальному прогрессу в технологии изготовления, мы не можем с первого взгляда отличить протез руки от настоящей. Некоторые модели имитируют морщины, вены, ногти и даже отпечатки пальцев. Хотя протез похож на настоящую руку, его цвет более розовый, как будто человек только что вышел из ванны.
Можно сказать, что протез руки достиг определенной степени сходства с человеческой формой, пожалуй, наравне с зубными протезами. Однако, когда мы понимаем, что рука, которая на первый взгляд кажется настоящей, на самом деле искусственная, мы испытываем тревожные, жутковатые ощущения. Например, во время рукопожатия мы можем быть поражены хрупкой бескостной хваткой «руки», а также её холодной текстурой. Когда это происходит, мы теряем чувство близости, и рука становится неестественной – «зловещей». В математических терминах это может быть представлено отрицательным значением. Таким образом, в данном случае внешний вид протеза руки вполне человекоподобен, но уровень близости – отрицательный, поэтому на рисунке 1 «рука-протез» расположена в нижней части долины. Этот пример иллюстрирует феномен «зловещей долины».


Я не думаю, что при ближайшем рассмотрении марионетка бунраку кажется очень похожей на человека. Ее реалистичность в плане размера, текстуры кожи и так далее не дотягивает даже до реалистичности протеза руки. Но когда мы наслаждаемся кукольным представлением в театре, мы находимся на определенном расстоянии от сцены. Абсолютный размер куклы не принимается во внимание, а ее общий вид, включая движения рук и глаз, близок к человеческому. Таким образом, учитывая нашу склонность как зрителей погружаться в этот вид искусства, мы можем почувствовать высокий уровень расположения к марионетке (её близости к человеческому образу).
Из предыдущего обсуждения читатели смогут понять концепцию «зловещей долины» или «долины сверхъестественного». Теперь давайте более подробно рассмотрим связь между «зловещей долиной» и движением.
Эффект движения
Движение является основополагающим для животных, включая человека, а значит, и для роботов. Его присутствие изменяет форму графика долины жути, усиливая пики и спады, как показано на рисунке. Для примера, когда промышленный робот выключен, он представляет собой просто засаленную машину. Но когда робот запрограммирован так, что его захват двигается подобно человеческой руке, мы начинаем чувствовать определенную близость к нему. (В этом случае скорость, ускорение и замедление должны приближаться к человеческим движениям). И наоборот, когда протез руки, находящийся в нижней части долины сверхъестественного, начинает двигаться, усиливается неприятное и даже жуткое ощущение.
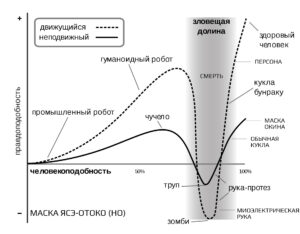
Рисунок 2. Наличие движения усугубляет тенденции спада «зловещей долины». Пунктирный путь стрелки на рисунке представляет собой внезапную смерть здорового человека. [Примечание переводчика: Но – это традиционная японская форма музыкального театра, возникшая в 14 веке, в которой актеры обычно носят маски. Маска ясэ-отоко имеет лицо истощенного человека и представляет собой призрак из ада. Маска окина изображает старика].
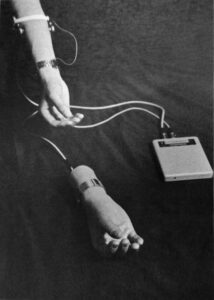
Некоторые читатели, возможно, знают, что технология последних лет позволила протезам рук автоматически разгибать и сжимать пальцы. Наиболее совершенная коммерчески доступная модель, показанная на рисунке 3, была разработана в Вене. Чтобы объяснить, как это работает, поясним, что даже если у человека отсутствует предплечье, намерение пошевелить пальцами вызывает слабый ток в мышцах руки, который может быть обнаружен с помощью электромиограммы. Когда протез руки обнаруживает ток с помощью электродов на поверхности кожи, он усиливает сигнал, чтобы активировать небольшой мотор, который двигает пальцами. Поскольку эта миоэлектрическая рука совершает движения, она может вызывать у здоровых людей чувство беспокойства. Если бы человек, носящий такую руку в темном месте, пожал ею руку женщины, та наверняка бы вскрикнула!
Поскольку негативные последствия движения очевидны даже при работе с протезом руки, целый робот значительно усилил бы ощущение пугающего. И это только один робот. Представьте себе художника, которого внезапно разбудили глубокой ночью. Он ищет что-то внизу среди множества манекенов в своей мастерской. Если бы манекены начали двигаться, это было бы похоже на историю ужасов.
Эффекты, связанные с движением, можно было наблюдать на Всемирной выставке 1970 года в Осаке, Япония. В связи с планами проведения этого мероприятия были созданы роботы весьма сложной конструкции. Например, один робот обладал 29 парами искусственных мышц на лице (столько же, сколько у человека), чтобы заставить его улыбаться по-человечески. По словам конструктора, улыбка – это динамическая последовательность деформаций лица, и скорость этих деформаций имеет решающее значение. Когда скорость уменьшается вдвое в попытке заставить робота улыбаться медленнее, вместо того чтобы выглядеть счастливым, его выражение лица становится устрашающим. Это показывает, как вследствие вариации движений то, что стало казаться очень близким к человеческому, например, робот, кукла или протез руки, может легко скатиться в «зловещую долину».
Спасаясь бегством в дизайн

В будущем мы надеемся разработать и создать роботов и протезы рук, которые не попадут в зловещую долину. Таким образом, из-за риска, присущего попыткам увеличить степень человеческого сходства, чтобы достичь второй вершины, я рекомендую дизайнерам вместо этого взять за цель первую вершину, которая приводит к умеренной степени человеческого сходства и значительному чувству близости. Фактически, я предполагаю, что можно создать безопасный уровень близости, намеренно стремясь к нечеловеческому дизайну. Я прошу дизайнеров поразмышлять над этим. Чтобы проиллюстрировать этот принцип, рассмотрим очки. Очки не похожи на настоящие глазные яблоки, но можно сказать, что их дизайн создал очаровательную пару новых глаз. Поэтому мы должны следовать тому же принципу при создании протезов рук. При этом вместо жалких на вид реалистичных рук в моду, скорее всего, войдут стильные.
В качестве другого примера рассмотрим эту модель человеческой руки, созданную резчиком по дереву, который лепит статуи Будды (рис. 4). Пальцы свободно сгибаются в суставах. На руке нет отпечатков пальцев, и она сохранила естественный цвет дерева, но ее округлость и красивые изгибы не вызывают никаких жутких ощущений. Возможно, эта деревянная рука могла бы послужить эталоном для дизайна.
Объяснение сверхъестественного
Будучи здоровыми людьми, мы находимся на гребне второй вершины на рисунке 2 (движемся). Когда мы умираем, то, конечно же, не можем двигаться, тело холодеет, а лицо бледнеет. Поэтому нашу смерть можно рассматривать как движение от второй вершины (движение) – ко дну «зловещей долины» (неподвижность), на что указывает путь стрелки на рисунке 2. Мы можем радоваться, что эта стрелка ведет вниз в неподвижную долину трупа, а не в долину, «населённую» живыми мертвецами!
Я полагаю, что этот спад объясняет тайну, лежащую глубоко под «зловещей долиной». Почему мы испытываем это жуткое чувство? Является ли оно необходимым для человека? Я еще не задумывался над этими вопросами, но не сомневаюсь, что это неотъемлемая часть нашего инстинкта самосохранения.
Необходимо начать строить точную карту «долины сверхъестественного» или «зловещей долины», чтобы с помощью научных исследований в области робототехники понять, что делает нас людьми. Эта карта также необходима для разработки дизайна нечеловеческих устройств, к которым люди смогут относиться с комфортом.
«Зловещая Долина» как феномен относится к различным дисциплинам, включая философию, психологию и дизайн, и именно поэтому, я думаю, она вызвала такой большой интерес.
-Масахиро Мори